


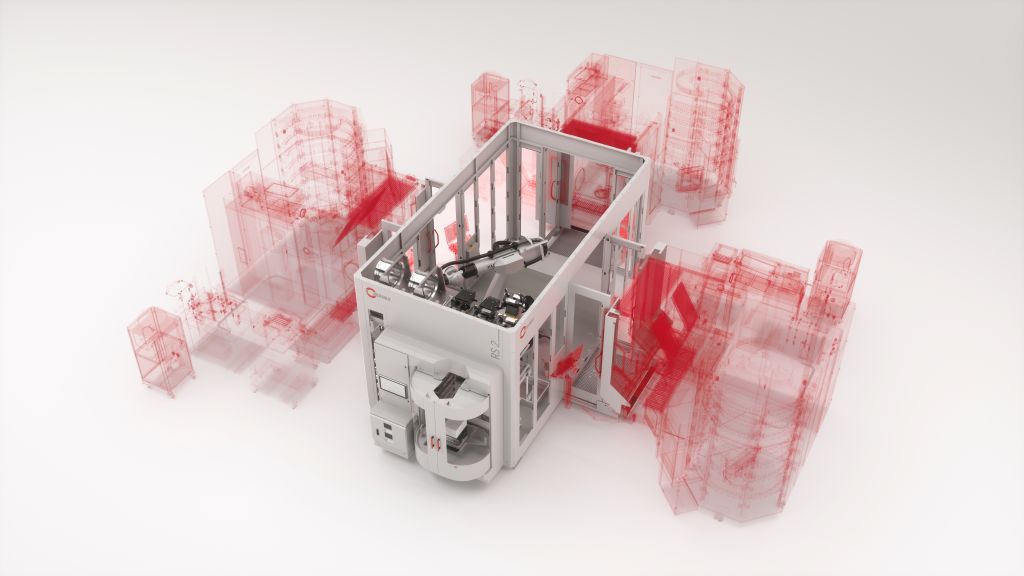
Il sistema si basa su una piattaforma ed è modulare, adattabile a diverse configurazioni. Questo porta anche alla possibilità di adattare il sistema a uno, due o addirittura tre centri di lavorazione HERMLE identici o diversi. La copertura è quasi completamente vetrata per una visione perfetta e offre fino a tre porte d'accesso doppie, garantendo anche una protezione ottimale per l'operatore, soprattutto quando esegue lavori manuali su una macchina. Diverse varianti di postazioni di attrezzaggio garantiscono un comodo inserimento dei pezzi nel sistema.

Sei moduli di scaffalatura garantiscono un'elevata e comoda scorta di pezzi. Progettati per lo stoccaggio di pallet, portapezzi o matrici e naturalmente anche per spazi di deposito per i più diversi tipi di pinze. Il robot a 6 bracci è posizionato centralmente nel sistema ed è progettato in modo tale da poter caricare perfettamente tutti gli spazi di lavoro delle macchine con un peso massimo di trasporto di 210 kg.
Il sistema viene trasportato in un'unica parte senza smontaggio, come tutte le macchine HERMLE, garantendo così un'installazione e un avviamento rapidi e senza problemi.
Pertanto, il sistema robotico è composto da diversi componenti principali, che qui verranno elencati e analizzati in dettaglio.
- Piattaforma di base in quattro varianti con involucro completamente vetrato
- Robot a 6 assi con capacità di carico di 210 kg
- Due sistemi di postazione di attrezzaggio con misurazione dell'altezza del pezzo e controllo della larghezza
- Sei moduli di scaffalatura individuali con una strategia di stoccaggio intelligente
- Fino a tre stazioni di trasferimento per la manipolazione dei pezzi
- Diversi sistemi di pinze, serraggio, pallet e matrici
- Software di controllo per un'ottimale operatività e strategia di lavorazione
Piattaforma di base in quattro varianti con involucro completamente vetrato
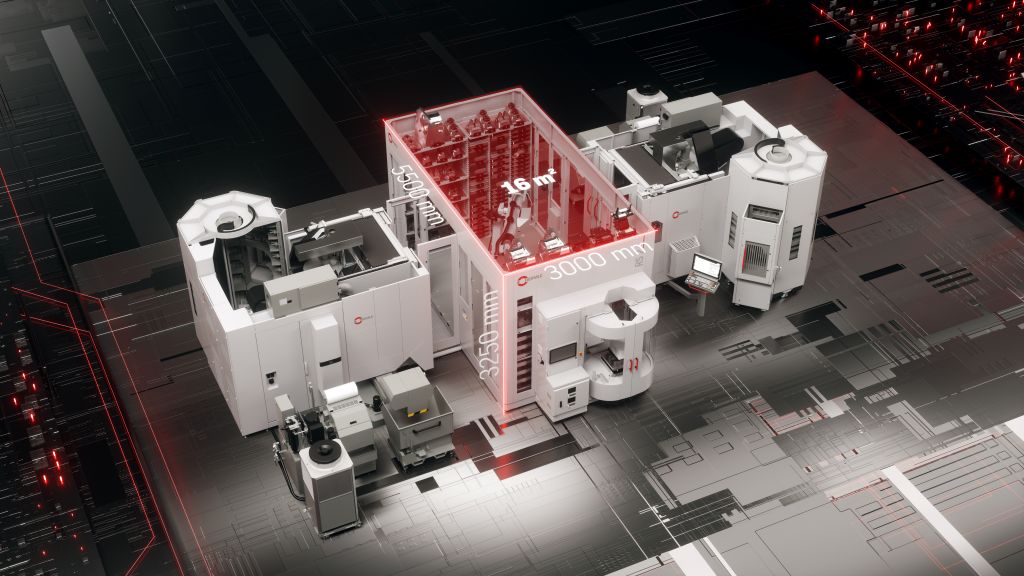
La piattaforma di base richiede uno spazio di appena 13 m², con dimensioni principali di 4,25 x 3,00 x 3,25 m (L x P x A). Il livello di espansione 1 richiede uno spazio di appena 16 m², con dimensioni principali di 5,50 x 3,00 x 3,25 m (L x P x A). È progettato come una costruzione saldata, viene prodotto nella propria produzione di lamiere, sostiene il robot a 6 bracci, i sistemi di scaffalatura e la copertura. Questa è quasi completamente vetrata per offrire all'operatore una buona visione del sistema.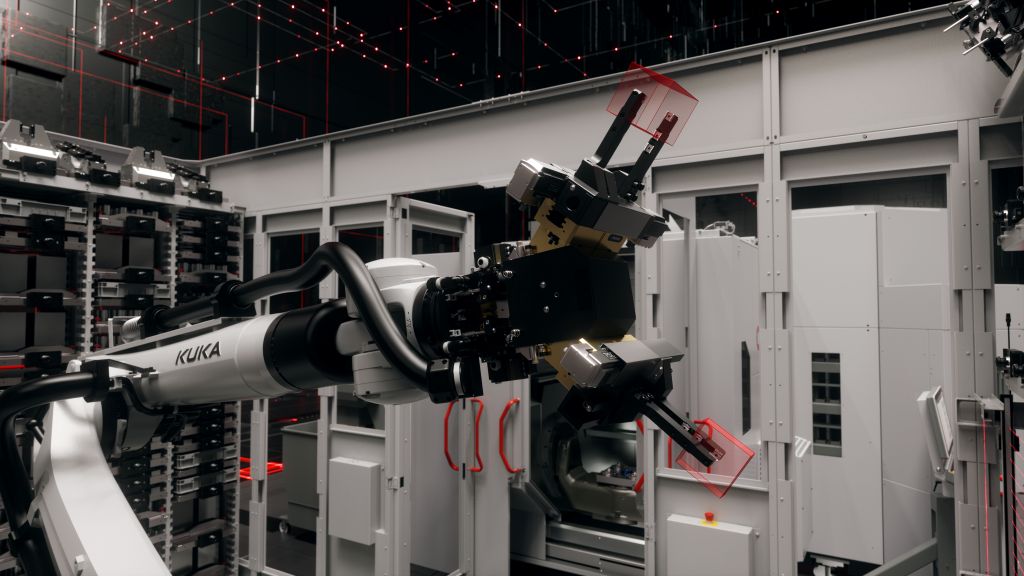
Robot a 6 assi con capacità di carico di 210 kg
Il robot a 6 assi si trova al centro del sistema ed è montato saldamente sulla piattaforma. Grazie alla sua disposizione ottimizzata, raggiunge fino a tre spazi di lavoro, fino a sei moduli di scaffalatura, la postazione di attrezzaggio e le due posizioni di deposito, il tutto con un peso di trasporto fino a 210 kg.
Due sistemi di postazione di attrezzaggio con misurazione dell'altezza del pezzo e controllo della larghezza
Al sistema può essere adattata una postazione di attrezzaggio manuale o opzionalmente girevole. Questa dispone di una grande vetratura e due porte girevoli, che, quando aperte per caricare la postazione di attrezzaggio, chiudono contemporaneamente l'accesso al sistema.
Un'idea geniale che si cela dietro la postazione di attrezzaggio è il sistema di monitoraggio laser. Il sistema di monitoraggio laser controlla l'altezza del pezzo e verifica la larghezza massima dei pallet/sistemi di supporto prima che il robot posizioni il pallet o il modulo portapezzi con matrice dalla postazione di attrezzaggio ai moduli di scaffalatura. Il software di controllo può così riconoscere rapidamente e facilmente la capacità libera nel modulo di scaffalatura e posizionare il pallet/sistema di supporto in modo ottimale nel sistema di stoccaggio.
Sei moduli di scaffalatura individuali con una strategia di stoccaggio intelligente
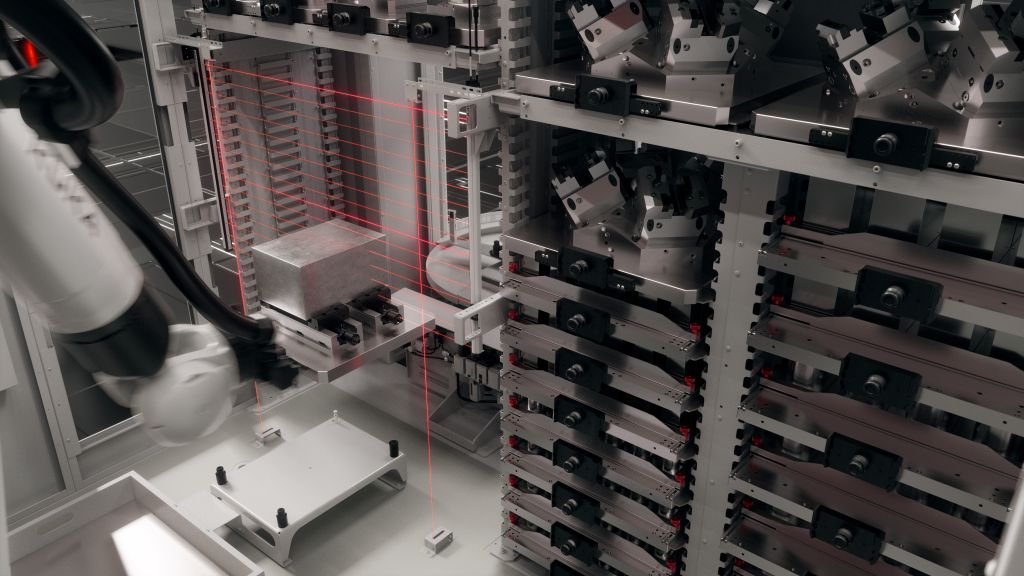
I sei moduli di scaffalatura di base offrono una varietà di possibilità e varianti di deposito. Grazie alla costante adattabilità della scorta nei nuovi scaffali, flessibili in larghezza e ottimizzati in altezza, le regolazioni manuali degli scaffali si riducono drasticamente. Pertanto, non è più necessaria una suddivisione rigida degli scaffali come in passato. Il software di controllo si occupa di questa attività e posiziona i pallet/sistemi di supporto in modo caotico nei moduli di scaffalatura, ottimizzando perfettamente lo spazio richiesto.
Il numero utilizzabile di moduli di scaffalatura dipende da quante macchine sono adattate al sistema robotico.
Fino a tre stazioni di trasferimento per la manipolazione dei pezzi
Per passare dal trattamento di lastre alla gestione dei pezzi, nel campo di lavoro del sistema robotico, a seconda di quante macchine sono adattate, sono disponibili una, due o tre stazioni di trasferimento per il deposito dei pallet/moduli portapezzi. Dopo un cambio di pinza, è possibile passare dalla gestione di pallet con pezzi o pezzi singoli. Pertanto, ad esempio, in una soluzione con due macchine, in una macchina possono essere attualmente prodotti pezzi su portapezzi, mentre nell'altra pezzi singoli. Alta flessibilità senza limitazioni.
Diversi sistemi di pinze, serraggio, pallet e matrici
Uno dei componenti più importanti di un sistema robotico sono i vari tipi di pinze. Hermle utilizza nei sistemi robotici per la gestione dei pezzi pinze standard o ibride, rispettivamente come pinze singole o doppie. Le pinze standard come pinze singole e doppie possono essere regolate manualmente da 8 a 319 mm. Il peso di trasporto per pinza è di 20 kg.
Le pinze ibride come pinze singole e doppie possono essere regolate automaticamente da 10 a 240 mm. Tutte le pinze possono essere adattate con i più diversi tipi di dita di pinza. Il peso di trasporto delle pinze ibride è di 25 kg, mentre per la pinza ibrida doppia è di 2 x 25 kg.
Per la gestione di pallet e portapezzi di matrici, è adattata una pinza NSR al robot. Con questa è possibile trasportare pallet con un peso fino a 210 kg e portapezzi di matrici fino a 600 x 600 mm con un peso fino a 180 kg. Oltre alle matrici standard, che presentano una griglia standardizzata per componenti identici, sono utilizzabili anche matrici universali di HERMLE, che possono essere regolate individualmente per diverse famiglie di pezzi.
Per offrire una lavorazione e gestione dei pezzi completamente automatizzata e sicura nel processo, nella RS 2 GEN2 è possibile anche cambiare automaticamente le ganasce delle morse. Questo consente un volume di pezzi ancora maggiore ed è un'ottima integrazione nel campo della lavorazione su 6 lati.
Software di controllo
Il software di controllo è il cuore e il cervello dell'impianto. Gestisce, verifica, coordina il flusso di lavoro nell'impianto. Comunica con l'operatore e mostra le condizioni del sistema. Strategie intelligenti di deviazione nell'ordine degli ordini (ad es. strumenti rotti, l'ordine non può essere ulteriormente lavorato, passare a un ordine alternativo in cui tutto è disponibile). Ideale anteprima delle attività per l'operatore con una pianificazione a lungo termine. Possibilità di pianificazione flessibili su più macchine.
Contatto:


